


روباتیک نرم ؛ تسهیل کننده مشکلات و موانع موجود در حوزه مهندسی و ساخت روباتها
روباتیک نرم زیرمجموعه خاصی از روباتیک است که با ساخت روبات هایی از مواد کاملاً انعطاف پذیر ، مشابه آنچه در موجودات زنده موجود است، سروکار دارد. روباتیک نرم از شیوه جابجایی موجودات زنده و سازگار با محیط اطراف خود الهام گرفته است. سامانههای ساختهشده بر اساس روباتیک نرم بهینهسازی میشوند تا مطابق با زیستگاه آنها کارهای تعیین شدهای را انجام دهند. روباتیک نرم که الهامگیرنده از طبیعت است به مطالعه سامانههای زیستی میپردازد و به دنبال سازوکارهایی است که بتوانند مشکلات و موانع موجود در حوزه مهندسی و ساخت روباتها را از سر راه بردارند. در مقایسه با روبات های ساخته شده از مواد سفت و سخت ، روباتیک نرم کمک به افزایش انعطاف پذیری و سازگاری را برای انجام کارها و همچنین افزایش ایمنی هنگام کار در اطراف انسان امکان پذیر می کنند. این ویژگی ها امکان استفاده بالقوه آنها را در زمینه های پزشکی و تولید فراهم می کند.
دنیای روبات های معمولی و عملکرد آنها در شرایط عادی بدون دقت بالا
روباتها میتوانند برنامه ریزی شوند تا یک وظیفه را میلیونها بار با حداقل خطا انجام دهند، کاری که برای ما خیلی دشوار است. اما اگر این روباتها را از کارخانه بیرون بیاورید، و جایی ببرید که محیط کاملا شناخته شده و اندازه گیری شده نیست، برای انجام یک کار که دقت بالایی هم لازم ندارد، ممکن است با شکست روبرو شوند. دلیل این عدم موفقیت روبات ها در ادامه بررسی می کنیم.

روباتیک نرم – روبات – سازگاری با محیط – انعطاف پذیری – هوش مجسم – روبات جراح – روبات رشد کننده – تعامل – اندوسکوپی کلاسیک
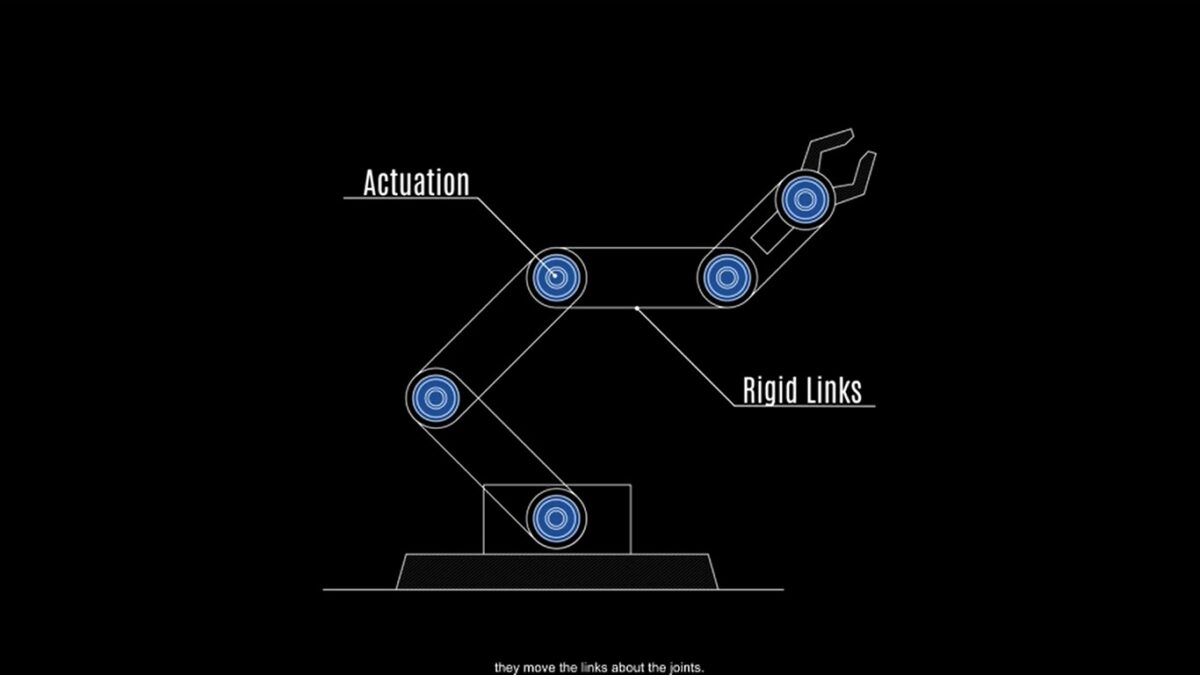
برای چندین سال، روباتها با تاکید بر سرعت و دقت طراحی شدهاند، و این موضوع در ساختار خیلی خاصی ترجمه میشود. اگر یکی از دست های یک روبات را جدا کنیم، مجموعه به دقت چیدهشدهای از اتصالات، و موتورهاست، که ما عملگر مینامیم، آنها اتصالات را حول مفصل حرکت میدهند. در این ساختار روباتیک، باید محیط را به دقت اندازه بگیرید، تا بدانید چه چیزی در محیط هست، و باید هر حرکت مفصلهای روبات را کاملا برنامهریزی کنید، زیرا خطایی کوچک، میتواند شکستی بزرگ به بار بیاورد. زیرا روبات با برخورد به جسم سخت تری می تواند هم به آن جسم آسیب بزنید هم خود روبات آسیب ببیند.
روباتیک نرم – روبات – سازگاری با محیط – انعطاف پذیری – هوش مجسم – روبات جراح – روبات رشد کننده – تعامل – اندوسکوپی کلاسیک
به مغز این روباتها فکر نکنید یا اینکه ما چقدر با دقت آنها را برنامه نویسی میکنیم، اما به جای آن به بدن آنها نگاه کنید. به وضوح مشکلی در آن هست، چون چیزی که یک روبات را دقیق و قوی میکند در دنیای واقعی آنها را به طرز مسخرهای خطرناک و بیاثر میکند، چون بدن آنها نمیتواند تغییر شکل بدهد یا تنظیم شود تا با دنیای واقعی بهتر تعامل کند. پس از جهت دیگری به این موضوع نگاه کنید، که روبات ها دارای بدن نرم تری باشند.
بیشتر بدانیم: روبوگامی >>
روبات های سازگار و دارای بدن نرم
شاید این گونه تصور شود که اگر روبات ها دارای بدن نرم باشند واقعا قادر به انجام هیچ کاری نیستند. خوب، طبیعت خلاف آن را به ما یاد داده است. برای مثال، در کف اقیانوس، زیر هزاران کیلوگرم فشار هیدرواستاتیک، جانوری کاملاً نرم تن، میتواند حرکت کند و با چیزی به مراتب سختتر از خودش تعامل کند. این اختاپوس با حمل این پوست نارگیل به لطف انعطافپذیری بازوچههایش به راحتی حرکت میکند. حتی همین اختاپوس میتواند سر یک شیشه را باز کند.

روباتیک نرم – روبات – سازگاری با محیط – انعطاف پذیری – هوش مجسم – روبات جراح – روبات رشد کننده – تعامل – اندوسکوپی کلاسیک
اما مشخص است که این قابلیت فقط به خاطر مغز این حیوان ممکن نشده است، بلکه به خاطر بدن او نیز هست، و این شاید مشخصترین مثال است، از هوش مجسم، که گونهای از هوش است که تمام موجودات زنده دارند. بدن ما، شکل، جنس و ساختار آن، نقشی اساسی در یک کار فیزیکی بازی میکند، چون میتوانیم با محیط اطرافمان تطابق پیدا کنیم تا بتوانیم در محدوده وسیعی از شرایط موفق باشیم بدون اینکه نقشهای بچینیم یا محاسبهای بکنیم.
پس بهتر است بخشی از هوش مجسم را در ماشینهای روباتیک قرار دهیم، تا آنها را از تکیه بر روبات هایی که بیش از حد محاسبات و حس کردن، دارند رها کنیم. برای این کار، میتوانیم از استراتژی طبیعت پیروی کنیم، زیرا میتوان فهمید که طبیعت از مواد نرم به کرات و از مواد سخت به ندرت استفاده میکند. این کاری است که در این زمینه جدید روباتیک انجام شده است و «روباتیک نرم» نام دارد، که در آن هدف اصلی ساختن دستگاههای فوق دقیق نیست، چون این کار قبلا انجام شده است. چیزی که باعث نرمی یک روبات میشود اول سازگاری بدن آن است، که از مواد یا ساختارهایی ساخته شده که میتوانند تغییر شکلهای خیلی زیاد را دوام بیاورند، پس دیگر اتصالات صلب نداریم. دوم اینکه برای حرکت دادن آنها، از چیزی استفاده میکنیم به نام تحریک توزیع شده، تا بتوانیم به طور پیوسته شکل این بدن شکل پذیر را کنترل کنیم، که اثری مانند داشتن تعداد زیادی اتصال و مفصل دارد، اما هیچ ساختار سختی در آن نیست.
پس میتوانید تصور کنید که ساختن یک روبات نرم فرآیندی بسیار متفاوت از روباتهای سخت است، که اتصال و دنده و پیچ دارند و باید به صورت کاملا مشخصی با هم ترکیب شوند. در روباتهای نرم، بیشتر اوقات فقط محرک را از پایه میسازید، اما ماده انعطافپذیر را طوری شکل میدهید که به ورودی مشخصی واکنش بدهد.
بیشتر بدانیم: بورچین >>
مثال هایی از روبات ها با بدنی نرم
خانم جیادا گربونی پژوهشگر روباتیک نرم، مثال هایی از روبات های ساخته شده را نشان می دهد. اولین روبات، یک روبات کوچک است که در دانشگاه هاروارد ساخته شده است و این روبات به لطف جریانهای فشاری که در بدنش اعمال شده، حرکت میکند. همچنین با انعطاف پذیری که دارد، میتواند زیر یک پل کوتاه بخزد، و به راه رفتن ادامه دهد. این یک نمونه خیلی ابتدایی است، اما آنها همچنین یک نمونه خیلی محکمتر توان سرخود هم ساختهاند که واقعا میتواند به جهان بیرون فرستاده شود و با مسائل آن روبرو شود مثل اینکه یک ماشین از روی آن رد بشود و او همچنان به کار خود ادامه بدهد.

روباتیک نرم – روبات – سازگاری با محیط – انعطاف پذیری – هوش مجسم – روبات جراح – روبات رشد کننده – تعامل – اندوسکوپی کلاسیک
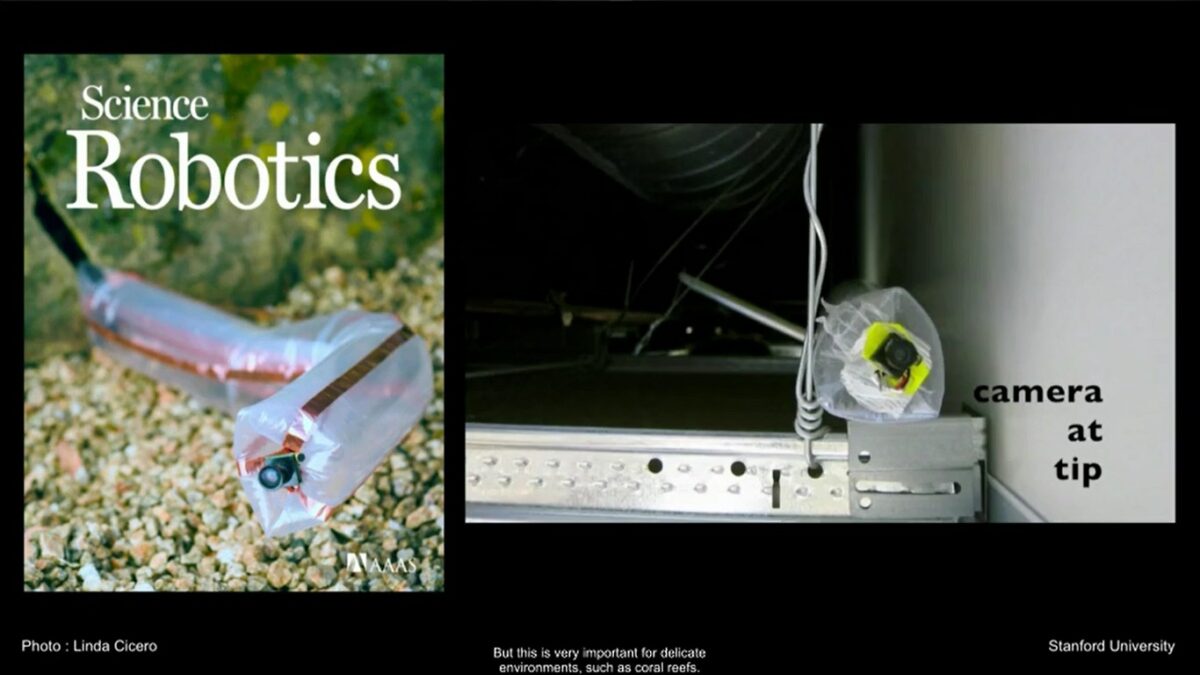
دومین روبات، یک ماهی روباتیک است، که مثل یک ماهی واقعی در آب شنا میکند صرفا به این دلیل که دمی نرم با محرک توزیع شده دارد و البته یک اختاپوس روباتیک هم با این شرایط داریم. چیزی که در ادامه میبینید درواقع یکی از اولین پروژههایی است که در این زمینه جدید روباتهای نرم ساخته شده است. اینجا، بازوچه مصنوعی را میبینید، اما آنها در واقع کل یک ماشین را با چندین بازوچه ساختهاند آنها میتوانستند آن را در آب بیندازند، و میبینید که میتواند به نوعی به اطراف برود و کاوشهای زیردریایی انجام دهد. اما این برای محیطهای ظریف مانند صخرههای مرجانی خیلی مهم است.

روباتیک نرم – روبات – سازگاری با محیط – انعطاف پذیری – هوش مجسم – روبات جراح – روبات رشد کننده – تعامل – اندوسکوپی کلاسیک
بیشتر بدانیم: آب آلوده قابل نوشیدن >>
روبات رشد کننده به کمک فشار هوا و روبات جراح
خانم جیادا از پروژه خود و همکارانش رونمایی می کند. اینجا منظرهای میبینید از روباتی در حال رشد وجود دارد. دوربین در بالا ثابت شده است. این روبات خاص است، چون با استفاده از فشار هوا، از سر رشد میکند، در حالی که باقی بدن در تماس با محیط محکم باقی میماند. این روبات از گیاهان الهام گرفته است، نه حیوانات. این روبات بوسیله مواد به صورتی مشابه رشد میکند تا بتواند با گستره وسیعی از موقعیتها مواجه شود.
روباتیک نرم – روبات – سازگاری با محیط – انعطاف پذیری – هوش مجسم – روبات جراح – روبات رشد کننده – تعامل – اندوسکوپی کلاسیک
خانم جیادا می گوید : ” من یک مهندس بیومدیکال هستم، و شاید کاربردی که من بیش از همه به آن علاقه دارم زمینه پزشکی است، و این بسیار دشوار است که بتوانیم تعاملی نزدیکتر با بدن انسان تصور با این روبات کنیم. روباتها میتوانند برای جراحی بسیار مفید باشند، چون آنها باید با استفاده از سوراخهای کوچک و ابزار مستقیم وارد بدن شوند، و این ابزارها باید با ساختارهای بسیار ظریفی در محیطی بسیار متغیر تعامل کنند و این کار باید ایمن انجام شود. بنابراین بردن دوربین درون بدن، یعنی بردن چشمان جراح به منطقه مورد جراحی خیلی چالشبرانگیز خواهد بود.
روباتیک نرم – روبات – سازگاری با محیط – انعطاف پذیری – هوش مجسم – روبات جراح – روبات رشد کننده – تعامل – اندوسکوپی کلاسیک
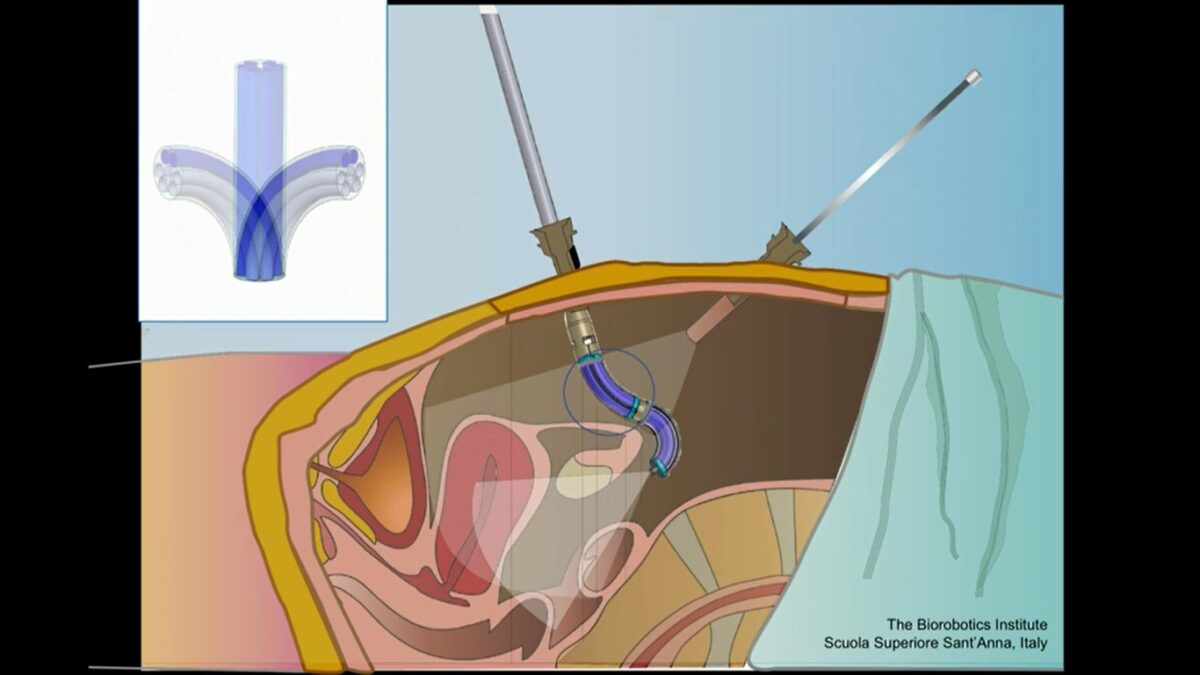
او با گروه تحقیقاتی قبلیاش در اروپا، روبات دوربیندار نرم را برای جراحی ساخته است، که خیلی با یک اندوسکوپ کلاسیک متفاوت است. این روبات میتواند به لطف انعطافپذیری قطعات حرکت کند. حتی میتواند در هر جهتی خم شود و همچنین تغییر طول بدهد. و این در واقع توسط جراحان استفاده شده است.
اما گاهی یک عمل جراحی میتواند تنها با استفاده از یک سوزن انجام شود، و حالا در استنفورد، روی یک سوزن خیلی انعطافپذیر کار میکنیم، به نوعی یک روبات نرم خیلی کوچک که از نظر مکانیکی برای تعامل با بافتها و رفتن درون یک اندام جامد طراحی شده است. این رسیدن به اهداف مختلفی را ممکن میسازد، مثل تومورها، در اعماق یک اندام جامد با استفاده از تنها یک نقطه ورود.
بیشتر بدانیم: میز لمسی آناتومی >>
چشم انداز روباتیک نرم
پس روشن است، که این زمانی بسیار هیجانانگیز برای روباتیک است. روباتهایی داریم که باید با ساختارهای نرم کار کنند، پس این سوالات تازه و بسیار چالشی را برای جامعه روباتیک برمیانگیزد و البته تازه در حال شروع به یادگیری کنترل، و قرار دادن حسگرها روی این ساختارهای بسیار انعطافپذیر هستیم. البته خیلی هم به آنچه طبیعت در طول میلیونها سال تکامل به آن دست یافته است ، نزدیک نیستیم.
اما خانم جیادا از یک چیز مطمئن هست که روباتها نرمتر و امنتر در آینده به کمک مردم خواهند آمد.
برگرفته از سایت: TED




ثبت ديدگاه