روبات دارای قدرت انسان ؛ ساخت روبات هایی که بسیار عملکردی شبیه انسان دارند
به اعتقاد عده ایی روبات دارای قدرت انسان نیست و هر آنچه که دارد تقلیل شده ی رفتار انسان ها و عملکرد آنهاست. آنهابر این باوراند که، روبات دارای قدرت انسان که به آن اشاره می شود فقط و فقط یک ماشین است. به این روبات کامپیوتر میگوید چه باید بکند و کامپیوتر هم به سنسورهایش بسنده میکند. روبات نه قدرتی دارد و نه کنترلی بر روی عملکردش. در عصر جدید تمام تلاش بر ساخت روبات با شباهت نزدیک به انسان با عملکرد و واکنشی مشابه در شرایط مختلف است. ولی این نصف ماجرا است. ماجرا از این قرار است که کامپیوتر در یک طرف قرار دارد و به روبات پیشنهاداتی میدهد. در طرف دیگر ماجرا، ماهیت فیزیکی دنیا قرار دارد. منظور از ماهیت جاذبه، اصطحکاک، برخورد با اشیا و … است. و این دقیقا همان چیزی است که ساخت روبات دارای قدرت انسان را سخت می کند .
برای داشتن روبات دارای قدرت انسان ، باید یک طراحی جامعی داشت. جایی که شما در حال طراحی نرمافزار، سختافزار و رفتارها هستید، همه در یک زمان، و همه این قسمتها با یکدیگر همکاری و درگیری دارند. وقتی که شما به یک طراحی کامل رسیدید، شما یک هماهنگی واقعی بین تمامی آن قسمتهای درگیر با یکدیگر دارید. پس نصفش کار شما نرمافزار و نصف دیگرش سختافزار، همراه با رفتار است.
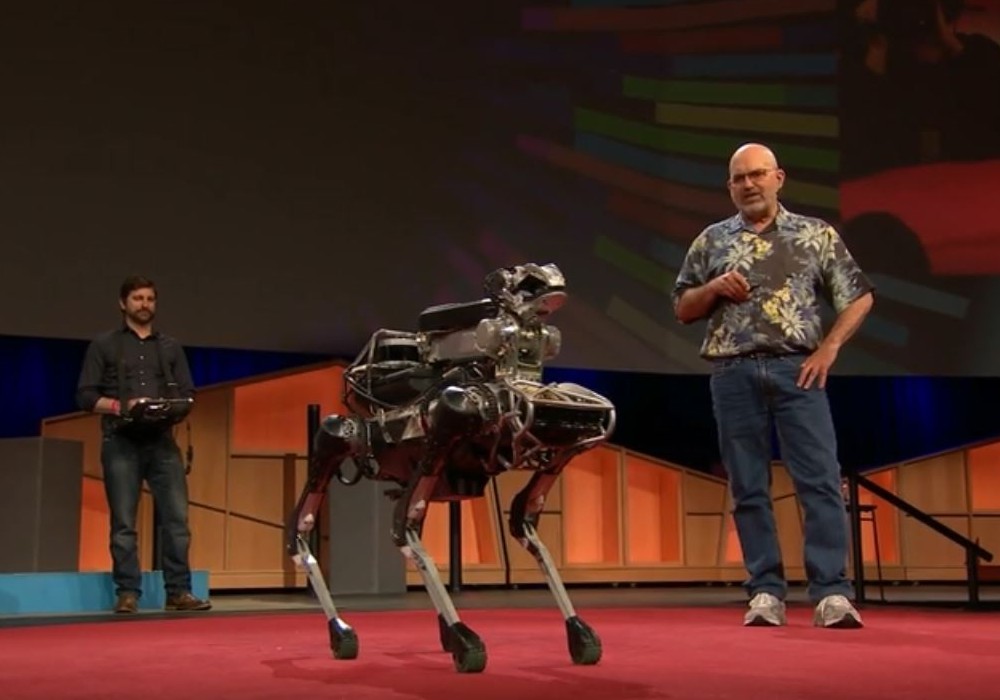
در اینجا مارک رابرت تصمیم دارد که از ساخت روبات های خود و گام به گام نزدیک شدن به اهدافش صحبت کند. او تمام روبات های ساخته شده اش را به ما معرفی می کند. در ادامه ما با قدم های او که در راه روبات دارای قدرت انسان در طی ۱۰ سال برداشته و رسیدن او به روبات جدیدش ، آشنا می شویم.
بیشتر بدانیم: درک احساس با هوش مصنوعی>>
مارک از هدف خود برای ساخت روبات ها می گوید
مارک رابرت، عاشق ساختن روبات است. و از هدف بلند مدت خود که ساختن روباتی است که بتواند هرآنچه انسان و حیوانات انجام میدهند، را انجام دهد می گوید . او سه هدف برای ساخت روبات هایش قرار داده و امیدوارست بتواند به این سه هدف در آینده نزدیک دست پیدا کند. مورد اول داشتن تعادل و تحرک پویا است، مورد دوم داشتن مهارت انجام کار هاست، و مورد سوم داشتن ادراک است.
منظور او از هدف اول این است که بتواند روبات دارای قدرت انسان بسازد تا با تعادل بایستد و حرکت کند. این قابلیتهای ساده باعث شدهاند که انسانها به هرجایی در زمین، با هرنوعی از پوشش بتوانند بروند. و ما میخواهیم این قابلیت را به رباتها بدهیم.
در مورد هدف دوم که مهارت نام دارد. او میخواهد روبات دارای قدرت انسان بسازد تا بتواند اشیاء را در دست بگیر و با آنها حرکت کند . مهمتر از آن بتواند با نگه داشتن شی بدنش را تکان دهد. پس داشتن روباتی که بتواند به جهان اطرافش قدم بزند تحرک داشته باشد برد بازوها و دستانش را افزایش دهد و همه چیز را تحت کنترل داشته باشد، روبات با ویژگی مهارت کنترل متحرک می نامند.
هدف سوم، ادراک است. یک انسان می تواند با نگاه به سالنی با بیش از هزار نفر به همراه سیستم پردازش تصویر شگفت انگیز خود تمامی افراد را در نقطه ایی ثابت در فضا ببیند. حتی با وجود حرکت سر، حتی با حرکت به اطراف. داشتن این نوع از ادراک متحرک برای ربات هایی که که در حال فراگیری در دنیا هستند، بسیار با اهمیت است.
بیشتر بدانیم: جعل ویدئو با هوش مصنوعی>>
نگاهی به روند ساخت روبات های مارک با افق دید سه هدف بزرگ او
مارک حدود ۱۰ سال است که ساخت روبات را شروع کرده است. اولین روبات او “سگ بزرگ” نام دارد، که دارای سنسور ژیرسکوپی است که باعث حفظ پایداری روبات می شود. روبات دوم او “یوزپلنگ” است که چهار نعل قدم بر میدارد و انرژی خود را با جستن در زمین بازیابی میکند. این روبات همیشه در حال محاسبات برای حفظ ثبات و حرکتش است.

روبات دارای قدرت انسان – روبات انسان نما – روبات اسپات – مارک – روبات و انسان
نسل سوم روبات ها را می توان گفت بزرگتر از همه روبات های اوست، که دارای چنان نیروی حرکتی در پاهایش است که میتواند در برف عمیق حرکت کند. و در نهایت “اسپات” ، نسل جدید روبات هایی که تا الان توسط او و همکارانش ساخته شده است . البته اولین روبات اسپات او برای تحویل بار مورد استفاده قرار گرفت. سپس به این روبات بازویی اضافه شد برای اجرای مهارت کنترل متحرک.

روبات دارای قدرت انسان – روبات انسان نما – روبات اسپات – مارک – روبات و انسان
اما یک چیز مهم در مورد ساختن روبات دارای قدرت انسان و مستقل این است که آنها را وادار کنیم بیش از کاری که از آنان خواسته شده است را انجام دهند، یعنی مجبور به رویارویی با عدم قطعیت آنچه که در دنیای واقعی اتفاق میافتد، شوند. به طور مثال روبات در حال بالا رفتن از پله است و ما او را با یک طناب به سمت پایین می کشیم و برنامه روبات می تواند تا این حد اختلال را تحمل کند.

روبات دارای قدرت انسان – روبات انسان نما – روبات اسپات – مارک – روبات و انسان
“آتلس” ، روبات دارای قدرت انسان ، که ما با ساخت آن بدنبال رسیدن به حدود دو سوم از سرعت میانگین انسان هستیم. این روبات از دو دست، بدنش و قدم هایش استفاده میکند، و نمونه کاملی از پایداری پویا، مهارت کنترل متحرک و ادراک متحرک است.

روبات دارای قدرت انسان – روبات انسان نما – روبات اسپات – مارک – روبات و انسان
و آخرین روبات دارای قدرت انسان مارک، بنام “هندل” است. هندل به این دلیل جالبه که نصف اش شبیه حیوان و نصف دیگرش شبیه دوچرخه است. کارایی ارزشمند آن حمل بار حدود ۴۵ کیلوگرم است. شاید بتواند بیش از آن را نیز بردارد. ولی این روبات مهارت بسیار خوبی در عبور از موانع زمینی را دارد.

روبات دارای قدرت انسان – روبات انسان نما – روبات اسپات – مارک – روبات و انسان
بیشتر بدانیم: میز آنوتومی>>
بیشتر بدانیم: تکنولوژی چیکو>>
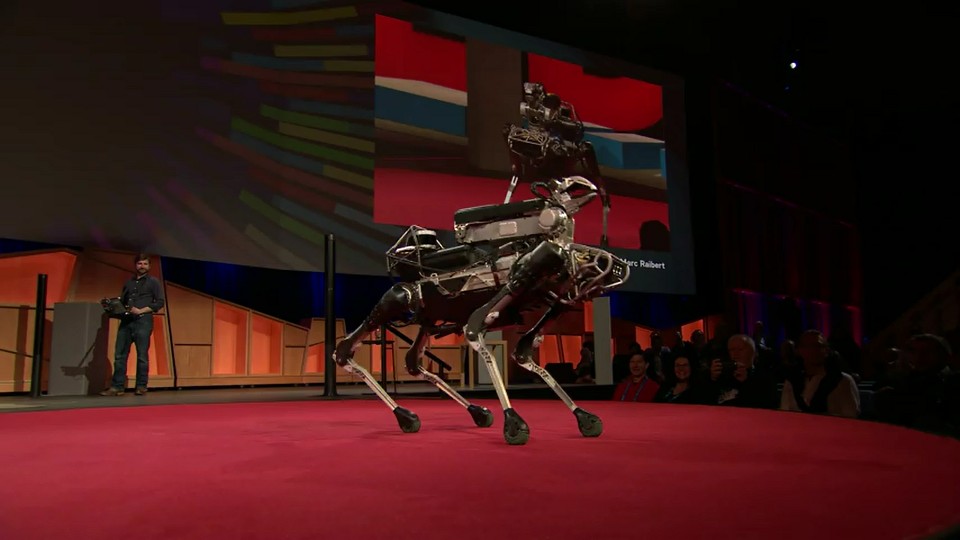
اسپات، روبات با چابکی در تحرک و دارای مهارت و ادراک
در این روبات دارای قدرت انسان تمامی هماهنگی پاها و سنسورها، بهوسیله کامپیوتر روی مدار روبات انجام میگیرد. این روبات میتواند با تعداد مختلفی مدل از قدم برداشتن راه برود؛ سنسور ژیروسکوپ دارد. بدیهی است که باتری و چیزهای مشابهی دارد. یکی از چیزهای جالب راجب این روبات چهارپا، همه جهته بودن حرکتش است. علاوه بر حرکت جلو-عقب، به چپ-راست نیز میتواند حرکت کند و در جا بچرخد.
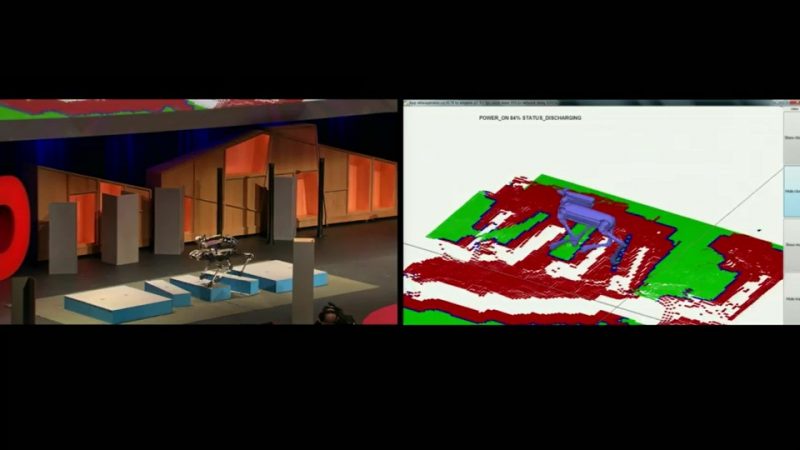
اسپات در محل صورتش، مجموعه ای از دوربین های استریو (سه بعدی) دارد. در قسمت بالا، مرکز تغذیه دهندهای دارد. نکته جالب این است که اسپات با دروبین جلو از زمین نقشه برداری می کند و موانع را با رنگ دیگری از سطح زمین نمایش می دهد. و برای حرکت از روی این موانع پردازش می کند که قدم بزرگ یا کوچکی بردارد. این دقیقا استفاده از پایداری پویا و ادراک متحرک است.چیز دیگری که اسپات دارد، بازوی رباتیکی است. او قادر است بازو را درسک نقطه ثابت نگه دارد و بدنش را تکارن دهد.
بیشتر بدانیم: تشخیص بیماری با هوش مصنوعی>>
روبات دارای قدرت انسان – روبات انسان نما – روبات اسپات – مارک – روبات و انسان
کاربرد روبات مارک در دنیای واقعی
روبات دارای قدرت انسان مارک قادر است به محل های آلوده به امواج رادیو اکتیو برود و آن محل ها را جستجو و پاک سازی کند. همچنین می تواند هرکس یکی از این روبات ها را در خانه برای مراقبت از سالمندان و معلولین داشته باشد. او همچنین صنایع نظامی را تامین کننده مالی بزرگی برای رباتیک می داند و استفاده از این تکنولوژی پیشرفته را همچون سایر تکنولوژی ها برای تمامی کاربرد ها ضروری می داند.
مارک رابرت: من عاشق ساختن روبات هستم و می خواهم هرآنچه انسان و حیوانات انجام میدهند، روبات ها هم بتوانند انجام دهند.
برگرفته از وب سایت: TED




ثبت ديدگاه